2026. 3. 13. 06:56ㆍ중국 휴대폰
다음은 중국 매체의 기사를 번역/ 요약한 것입니다.
원문: https://mp.weixin.qq.com/s/xouTVlsufTrx31bSX-94QQ
https://mp.weixin.qq.com/mp/wappoc_appmsgcaptcha?poc_token=HHc4XGmj37t1Tu53GlnG1B_Vyi4KUXPGXbZC2Fpb&target_url=https%3A%2F%2Fmp.weixin.qq.com%2Fs%2FxouTVlsufTrx31bSX-94QQ
环境异常 当前环境异常,完成验证后即可继续访问。
mp.weixin.qq.com
====================================================================
26개의 주요 LiDAR 제품에 대한 심층 연구를 완료하여 시스템 원리, 하드웨어 아키텍처 및 핵심 구성 요소를 분석했습니다.
이 제품군은 RoboSense, Hesai, Huawei, Tudacom 등 주요 브랜드의 제품을 포함하며,
2022년부터 2025년 사이에 출시된 플래그십 모델도 포함합니다.
제품 유형 면에서는 전방 감시형부터 사각지대 보정형, MEMS 기반부터 회전 거울 기반, 905nm부터 1550nm 공정 기반,
16라인부터 520라인까지 다양한 제품군을 아우릅니다.

본 논문은 이러한 분석들을 요약하고, 26개의 실제 제품 사례 관찰을 바탕으로 LiDAR의 현황과 발전 추세를 논의합니다.
주로 스캐너, 레이저, 검출기, 프로세서 솔루션과 더불어 주요 4개 업체의 제품 분석 및 전략적 배치 특성을 다룹니다.
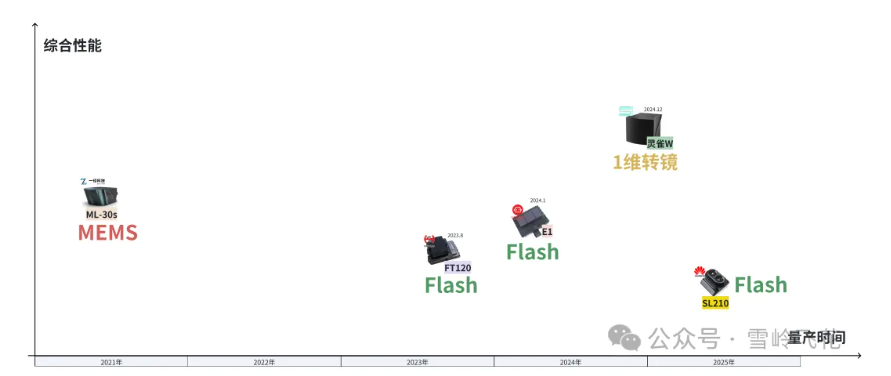
분석된 제품
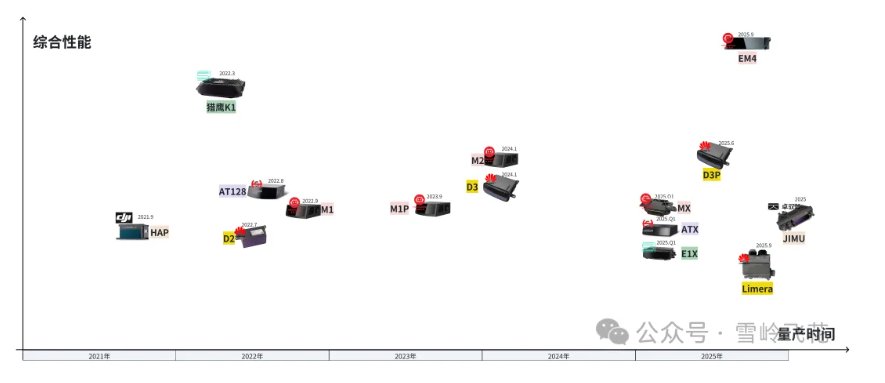
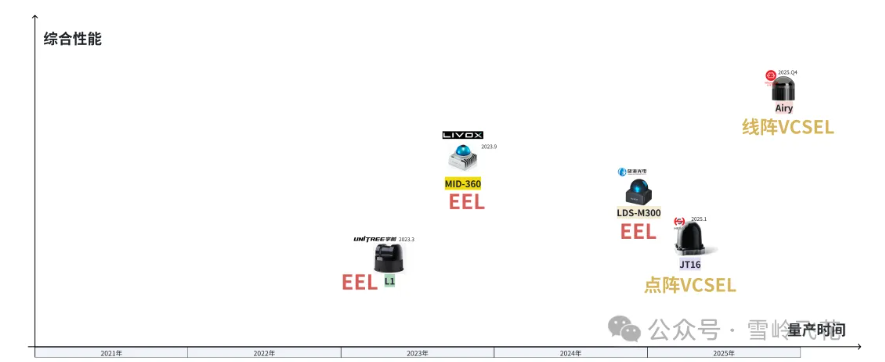
추세를 보다 명확하게 보여주기 위해 본 연구에서 분석한 26개 제품을 양산 시기와 전반적인 성과에 따라 분류했습니다.
차량 탑재형 전방 레이더는 다음과 같이 배분됩니다.
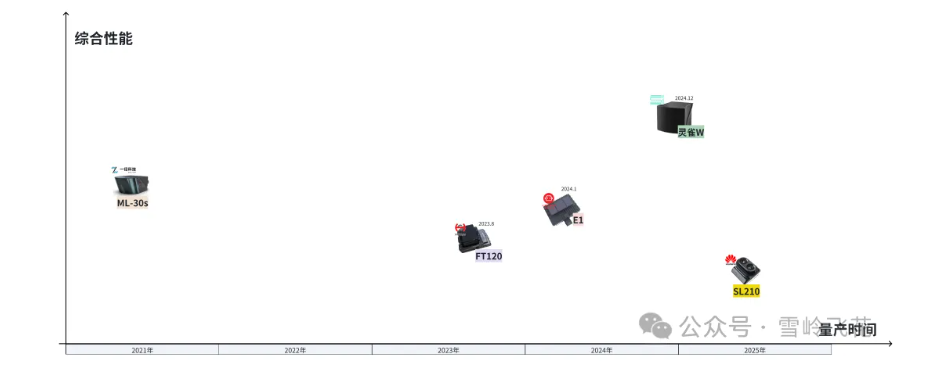
사각지대 라이다의 분포는 다음과 같습니다.
360° 라이다 분포는 다음과 같습니다.

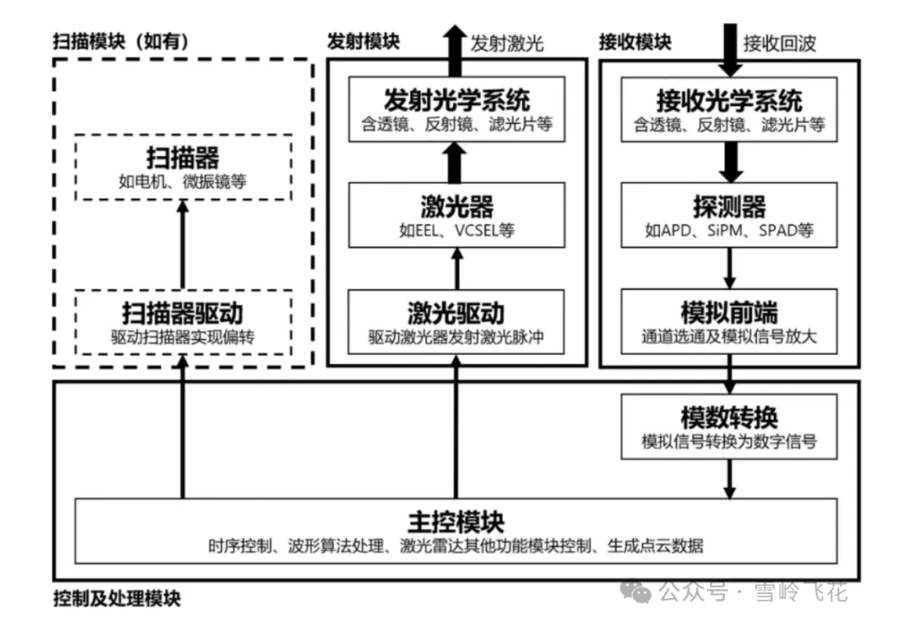
LiDAR 시스템은 복잡한 구조와 수많은 구성 요소를 가지고 있습니다.
그중에서도 스캐닝 방식, 레이저, 검출기, 프로세서는 제품의 전반적인 성능에 가장 큰 영향을 미칩니다.
다음 섹션에서는 이 네 가지 측면에 대해 자세히 살펴보겠습니다.
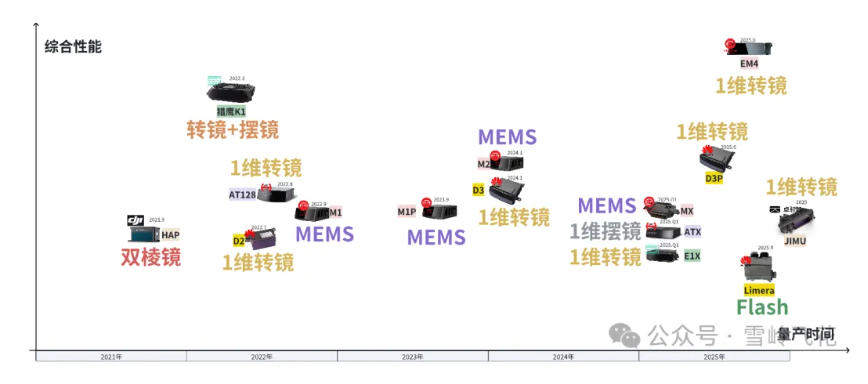
스캐닝 방식
스캐닝 방식은 LiDAR의 기본 구조를 결정하며, LiDAR 개발을 시작할 때 가장 먼저 결정해야 하는 설계 요소입니다.
스캔 방식에 따라 라이다는 크게 기계식, 반고체식, 순수 고체식의 세 가지 범주 로 나뉩니다.
- 기계식: 송수신 모듈 전체가 모터에 의해 회전하여 360° 시야각 스캔이 가능합니다. 일반적으로 크기가 크고 가격이 높습니다. 주로 차량 탑재형 데이터 수집 및 측량, 로봇 및 스마트 잔디깎이와 같은 지능형 애플리케이션에 사용됩니다.
- 회전 거울, MEMS 마이크로 거울, 프리즘 등을 포함하는 하이브리드 고체 솔루션은 성능, 비용 및 신뢰성 사이에서 균형을 이루며, 현재 자동차에 사전 설치되는 시스템의 대량 생산에 있어 주류를 이루고 있습니다.
- 순수 고체형: 움직이는 부품이 없어 레이저와 광학 부품을 사용하여 시야(FOV)를 직접 스캔합니다. 현재는 주로 플래시 방식으로 사용되며, 단거리 광각 감지 또는 장거리 소각 감지에 적합합니다.
1. 장거리 라이다용 스캐닝 방식
하이브리드 고체 레이더는 장거리 레이더의 주요 솔루션이며, 최근 몇 년 동안 개발이 활발히 진행되어 왔습니다.
- 프리즘 기술은 더 이상 자동차 분야에 사용되지 않습니다.
- MEMS는 소형 검류계를 통해 빔 편향을 구현하는 소형 소자입니다. 그러나 포인트 클라우드의 규칙성 및 편향 각도와 같은 문제로 인해 현재 점차 사용이 줄어들고 있습니다.
- 회전식 거울(일반적으로 1차원 회전식 거울 방식)은 모터를 사용하여 거울을 회전시켜 스캔합니다. 뛰어난 신뢰성과 보다 균일한 포인트 클라우드 생성 효과 덕분에 장거리 레이더의 주류 솔루션으로 자리 잡았습니다.
현재 가장 일반적으로 사용되는 회전 거울 방식은 3면 회전 거울과 4면 회전 거울입니다.

ATX는 1차원 틸팅 미러를 최초로 사용하여 비용을 절감하고 무신호 각도 범위를 줄이며
회전 미러의 시간 활용도를 향상시켰습니다.
가장 일반적으로 사용되는 미러 모터 드라이버는 MPS의 MP6541 및 MPQ6547과 TI의 DRV8316 및 DRV8305 솔루션입니다.

2. 단거리 라이다용 스캐닝 방식
초창기 레이더는 MEMS나 1차원 회전 거울과 같은 반고체 소자를 사용했습니다.
하지만 비용과 성능의 균형을 고려할 때, 단거리 레이더에는 완전 고체 플래시 메모리 솔루션이 주류로 자리 잡고 있습니다.
향후 고체 광학 스캐닝 기술이 성공적으로 개발된다면 순수 고체 기반의 장거리 레이더 구현이 가능해질 것입니다.

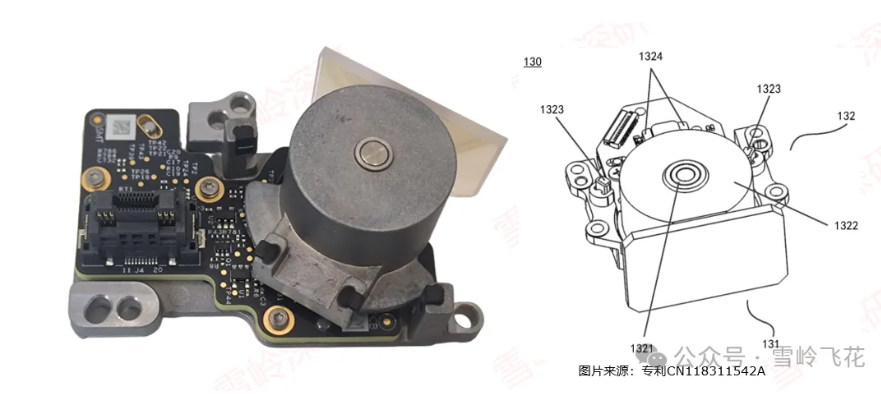
3. 360° LiDAR 스캔 방식

360° 스캔이 필수적이기 때문에, 레이저와 검출기가 회전하지 않는 "이중 프리즘" 반고체 스캔 방식을
사용하는 MID-360을 제외하고는 나머지 레이더들은 모두 기계식 스캔 레이더입니다.
L1과 LDS-M300 모두 수평 스캔용 모터 하나와 수직 스캔용 모터 하나, 총 두 개의 모터를 사용합니다.
예를 들어, LDS-M300의 스캔 방식은 다음과 같습니다.

JT16과 Airy는 모두 수평 스캔에는 모터 하나만 사용하고, 수직 스캔에는 전자식 스캔 방식을 사용합니다.
예를 들어 JT16은 다음과 같습니다.

JT 시리즈의 스캔 원리:

원자 램프
레이저는 라이다의 "광원"이며, 주로 사용되는 유형으로는 EEL, VCSEL 및 광섬유 레이저가 있습니다.
- EEL(Edge-Emitting Laser): 레이저 빔이 칩 가장자리에 평행하게 방출되어 강력한 빔 방향성과 높은 출력 밀도를 제공합니다.
- VCSEL(수직 공진 표면 방출 레이저): 레이저 빔이 칩 표면에 수직으로 방출되어 2차원 배열 집적화가 가능합니다. 크기가 작고, 전력 소비가 적으며, 비용이 저렴하고, 대량 생산 안정성이 우수합니다. 하지만 출력 밀도는 상대적으로 낮습니다.
- 파이버 레이저는 광섬유 를 이득 매질로 사용하여 1550nm 파장의 레이저를 출력합니다. 높은 출력, 뛰어난 간섭 방지 기능, 그리고 인체에 대한 높은 안전성을 제공합니다. 하지만 부피가 크고 가격이 비싸며, 전기-광 변환 효율이 EEL/VCSEL보다 낮다는 단점이 있습니다.
로보센스 E1, EM4, 링큐 E1X와 같은 일부 새로운 레이더들이 940nm 대역을 사용하려는 시도를 하고 있다는 점을
언급할 가치가 있습니다.
905nm 파장과 비교했을 때, 940nm 파장 성분은 햇빛에 더 낮은 농도로 존재하므로 신호 대 잡음비가 더 우수합니다.
또한, 사람의 눈은 905nm보다 940nm 파장을 15% 더 잘 견디므로 940nm 파장에서 더 높은 유효 출력을 얻을 수 있습니다.
하지만 일반적으로 검출기는 905nm에서 더 높은 PDE 값을 가지며, 905nm 대역에서 수증기의 흡수 효과는
940nm 대역보다 낮습니다.
따라서 940nm 기술이 트렌드가 될지는 두고 봐야 합니다.
1. 장거리 라이다 레이저

905nm/940nm 분야에서 가장 뚜렷한 추세는 VCSEL이 EEL을 점차 대체하고 있다는 점입니다.
EEL과 비교했을 때, VCSEL은 집적화 및 대량 생산이 용이하고 비용이 저렴합니다.
최근 다층 접합 VCSEL 기술이 성숙해짐에 따라 전력 밀도의 단점이 극복되어 시장 점유율이 지속적으로 증가하고 있습니다.
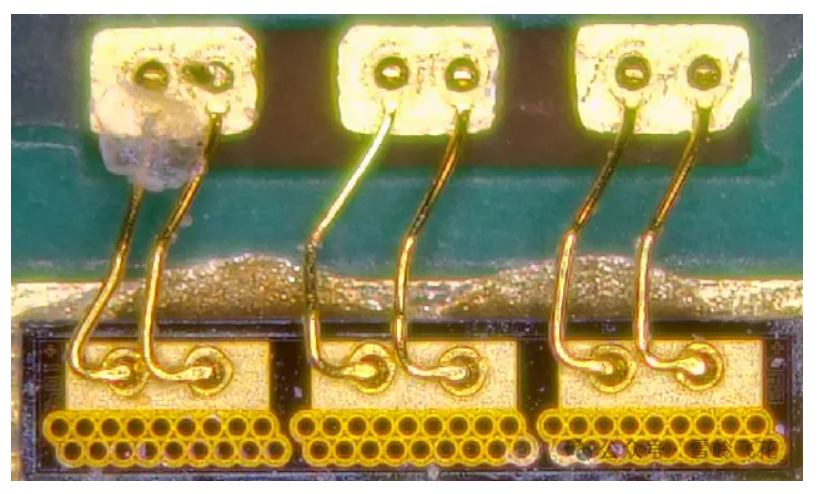
VCSEL은 모양에 따라 도트 배열, 선형 배열, 영역 배열의 세 가지 유형으로 나뉩니다.
장거리 레이더는 주로 도트 배열 VCSEL과 선형 배열 VCSEL을 사용합니다.
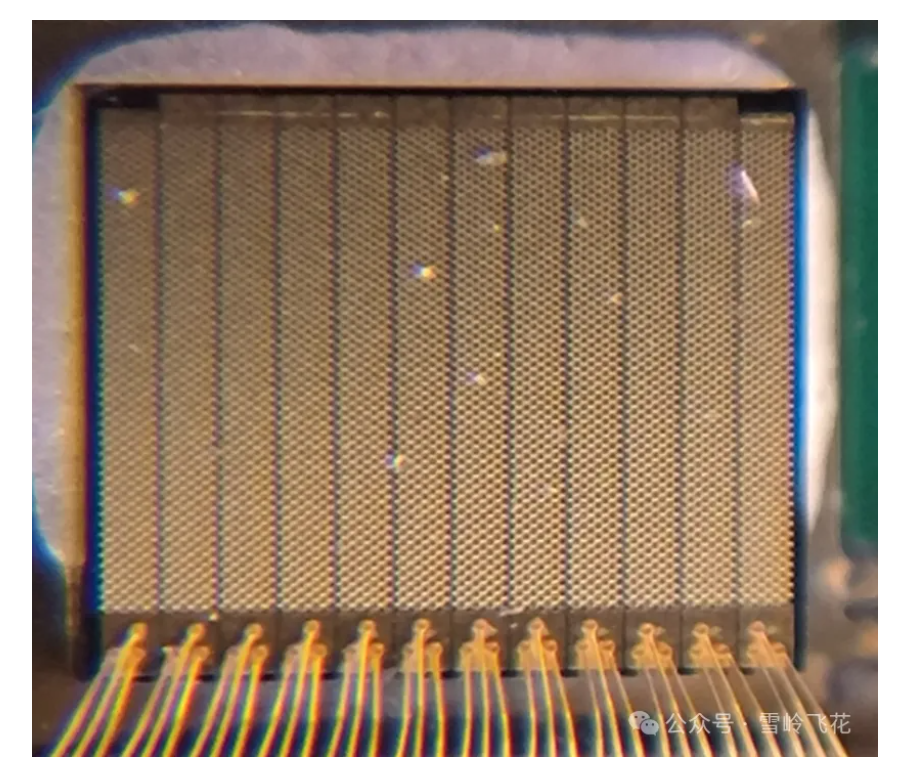
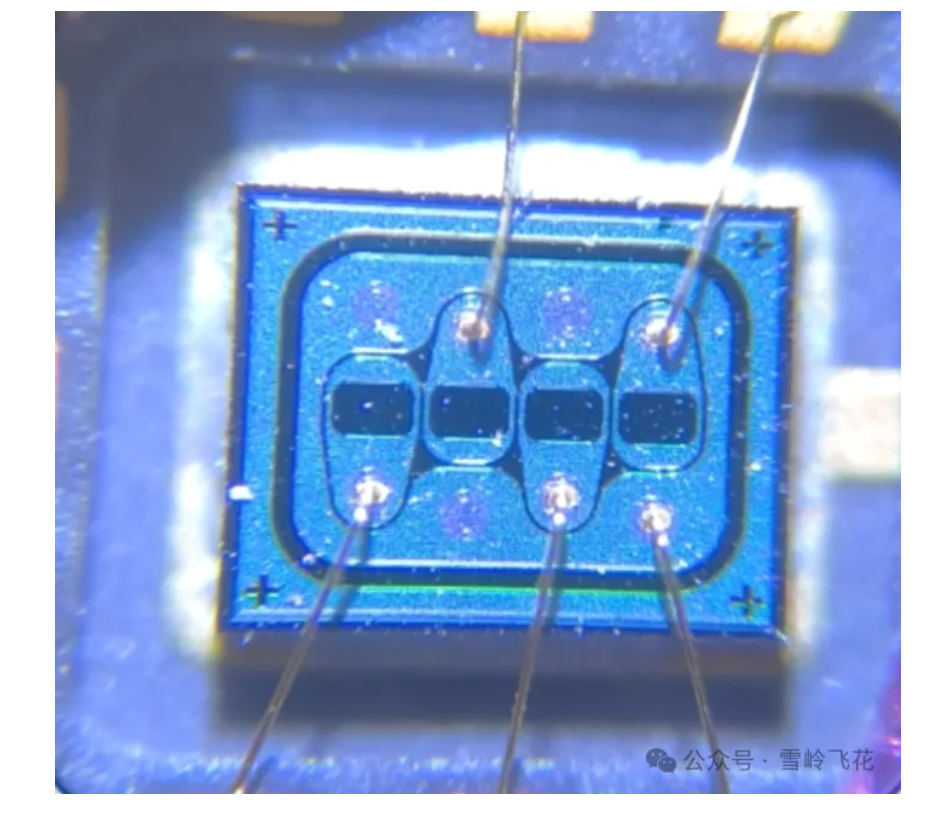
다음은 주로 SiPM과 함께 사용되는 격자형 VCSEL입니다.
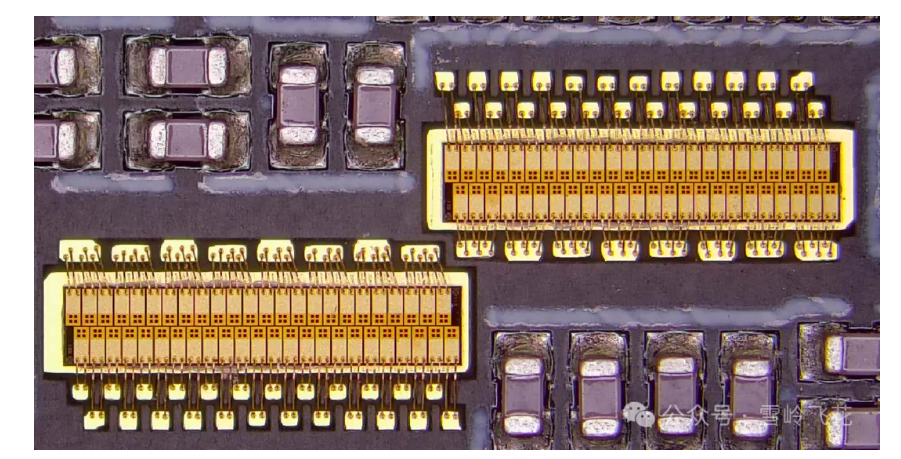
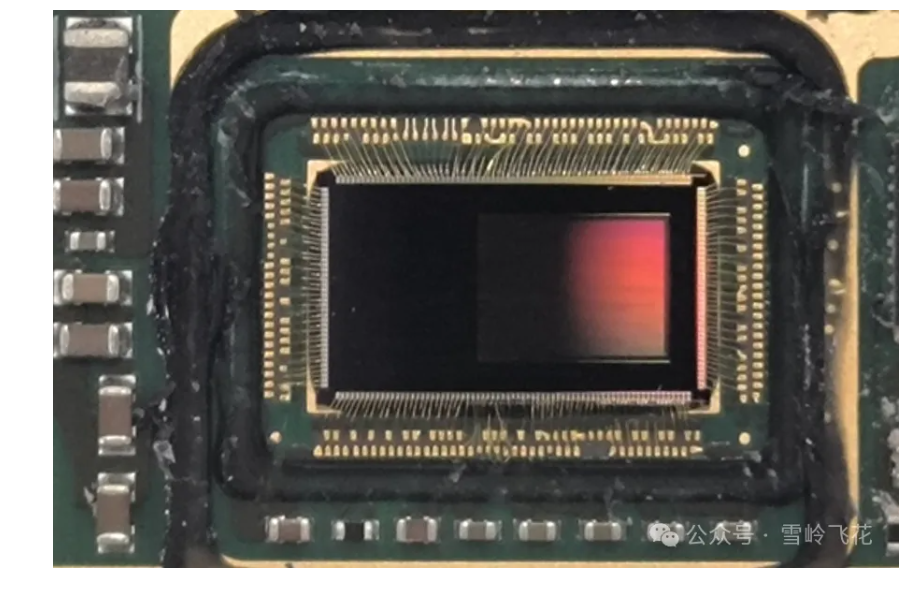
아래 그림은 SPAD-SoC와 함께 주로 사용되는 선형 VCSEL을 보여줍니다.
우리가 분석한 장거리 레이더 중에서 화웨이 리메라는 1차원 주소 지정 방식의 VCSEL 레이저 어레이를 사용하는
유일한 플래시 라이다(협각)입니다.
2. 단거리 라이다 레이저

단거리 라이더의 주류 솔루션은 영역 배열 VCSEL과 SPAD-SoC를 사용하는 플래시 라이더입니다.
주소 지정 방식에 따라 영역형 VCSEL은 1차원 주소 지정 방식과 2차원 주소 지정 방식으로 further 세분화됩니다.
1차원 주소 지정 가능 VCSEL은 레이저의 방출 방향을 한 방향으로만 제어합니다. 예를 들면 다음과 같습니다.
2D 주소 지정 방식의 VCSEL은 두 방향에서 발광을 지원하여 유연한 매트릭스 분할 및 스캐닝을 가능하게 하며,
높은 역팽창 및 단일 광자 간섭과 같은 문제를 더 효과적으로 억제할 수 있습니다.

단거리 라이다 분야에서 헤사이 FT120 역시 플래시 라이다이지만,
평면 VCSEL을 사용하지 않고 도트 매트릭스 VCSEL을 사용합니다.
이 도트 매트릭스 VCSEL은 광 균일화 장치를 통해 레이저 조사 영역을 넓혔습니다.
이러한 설계는 유사 제품들 사이에서 비교적 드뭅니다.
3. 360° LiDAR 레이저
360° 라이다에서는 EEL과 다양한 유형의 VCSEL이 모두 사용됩니다.
선형 VCSEL은 SPAD-SoC와 결합하여 더 높은 스캐닝 빔 밀도와 스팟 빈도 밀도를 달성할 수 있으며,
EEL은 더 긴 검출 거리를 제공할 수 있습니다.
도트 매트릭스 VCSEL은 비용 효율성이 더 높고 일반적으로 더 나은 가성비를 제공합니다.
탐지기
검출기는 반사된 레이저 신호를 감지하는 역할을 하며, 검출기의 감도는 감지 거리와 정확도에 영향을 미칩니다.
주요 검출기 유형 에는 APD, SiPM 및 SPAD가 있습니다.
- APD(애벌랜치 광다이오드): 애벌랜치 증폭 효과를 이용하여 광전류를 증폭하는 소자로, 적당한 감도, 넓은 동적 범위, 그리고 저렴한 가격을 제공합니다. 선형 모드에서 출력 전류는 입사광의 강도에 비례하므로 강한 신호 검출에 적합합니다.
- SiPM(실리콘 광증폭관): 수십에서 수천 개의 소형 SPAD 어레이로 구성되어 있으며, SPAD의 높은 감도와 APD의 넓은 동적 범위를 결합하고, 강력한 간섭 방지 기능을 갖추고 있으며, 다중 광자 신호를 동시에 처리할 수 있습니다.
- SPAD(단일 광자 애벌랜치 다이오드): 가이거 모드로 동작하며, APD보다 훨씬 뛰어난 감도로 단일 광자를 감지할 수 있습니다. 극히 약한 반사 신호까지 포착하여 레이더 탐지 범위와 해상도를 크게 향상시킵니다. SPAD-SoC는 높은 감도를 제공하지만, SiPM 및 APD에 비해 크로스토크 문제가 발생하기 쉽습니다.
1. 장거리 라이다 검출기

1550nm 라이다의 경우, SiPM은 일반적으로 1100nm 미만의 파장을 가진 광자만 감지할 수 있으므로 APD가 여전히 필요합니다.
905nm 공정에서는 SPAD/SiPM이 APD를 빠르게 대체하고 있습니다.
SPAD와 SiPM 중 어느 것이 더 나은지는 업계에서 많은 논쟁거리였습니다.
Parity Electronics에서 제공하는 비교 자료는 다음과 같습니다.
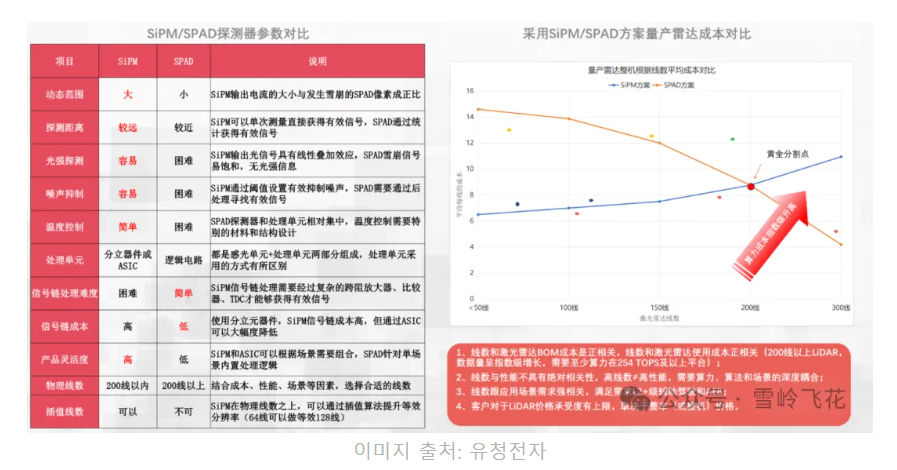
제 개인적인 의견으로는 200라인 이상의 고빔 라이다의 경우 SPAD 솔루션이 SiPM 솔루션보다 비용 측면에서 훨씬 유리하며,
현재로서는 선형 VCSEL + SPAD-SoC를 사용하는 것이 최적의 솔루션이라고 생각합니다.
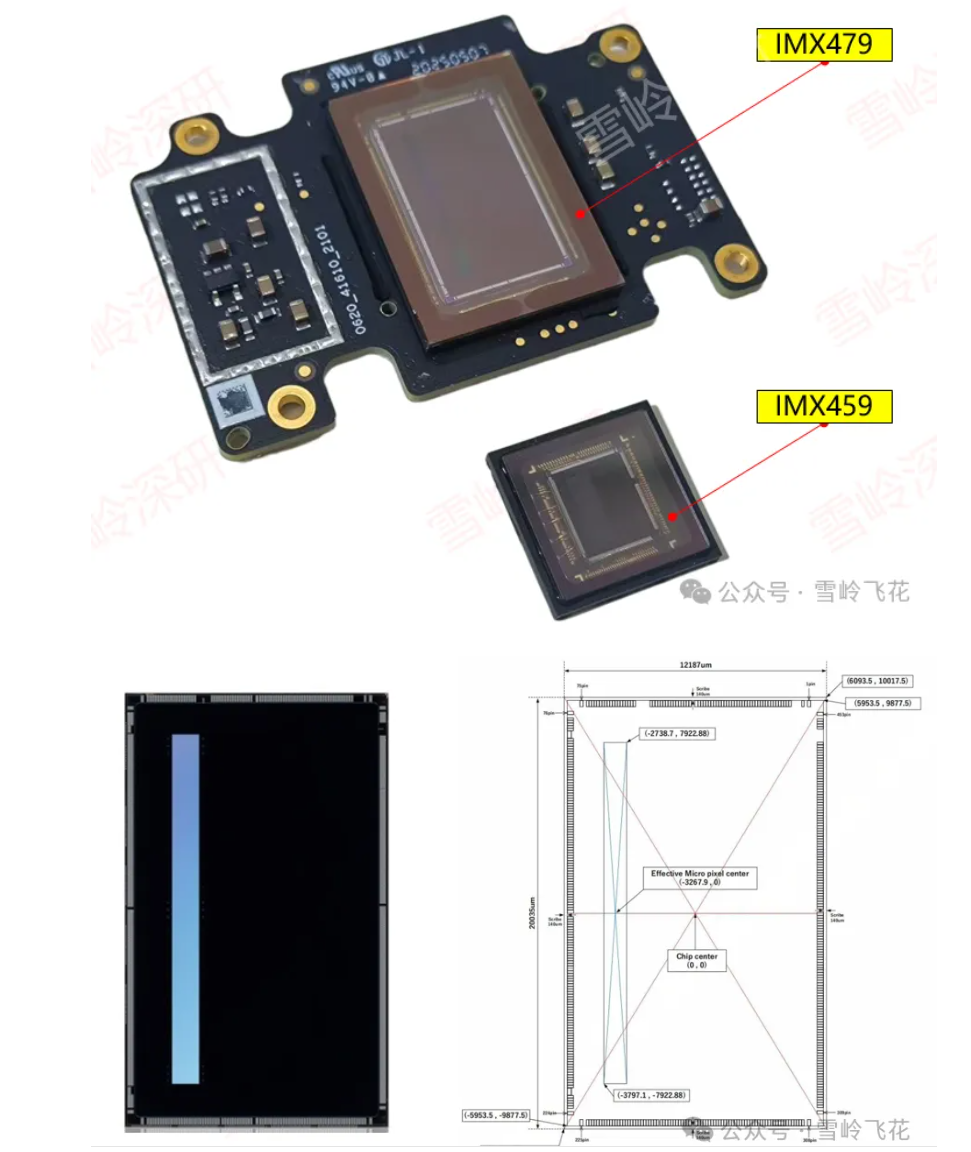
예를 들어, 일부 고광도 라이다 시스템은 0.05°*0.05°의 각도 해상도를 구현할 수 있는 소니의 IMX479를 채택했습니다.
라인 수가 200개 미만인 LiDAR 시스템의 경우, 현재 SPAD와 SiPM 솔루션이 모두 사용되고 있으며,
이는 주로 제조사의 아키텍처 관련 기술 전문성에 따라 결정됩니다.
화웨이와 로보센스는 주로 SPAD 솔루션을 사용하는 반면, 허사이와 투다통은 주로 SiPM 솔루션을 사용합니다.
예를 들어, 허사이의 ATX 시스템은 SiPM 솔루션을 사용합니다.

2. 단거리 라이다 검출기

초기 단거리 라이다 시스템은 APD(고급 위치 결정 장치) 솔루션을 사용했습니다. 예를 들면 다음과 같습니다.

현재 주류 접근 방식은 SPAD 솔루션을 사용하는 것입니다. 예를 들면 다음과 같습니다.
3. 360° LiDAR 검출기

360° LiDAR 시스템에서는 감지 성능에 대한 요구 조건이 비교적 낮기 때문에
APD(자동 광검출기)가 여전히 널리 사용되고 있습니다.
DJI Mid-360은 하마마쓰에서 맞춤 설계한 APD 검출기를 사용합니다.
프로세서
프로세서는 라이다 신호 트리거링, 에코 신호 처리, 전반적인 통신 및 진단을 제어하는 역할을 담당합니다.
현재 LiDAR에는 FPGA, SoC, MCU 등 다양한 종류의 프로세서 칩이 주로 사용됩니다.
FPGA는 높은 유연성과 빠른 처리 속도를 제공하지만 가격이 더 비쌉니다.
SoC는 여러 기능을 통합하여 집적도를 높입니다. MCU는 일반적으로 연산 능력이 낮으며 주로 통신 및 진단 기능에 사용됩니다.
프로세서마다 성능 특성이 다르기 때문에 많은 LiDAR 시스템은 여러 종류의 프로세서를 조합하여 사용하는 경우가 많습니다.
지금까지 살펴본 제품에 사용된 프로세서는 다음과 같습니다.
1) 가장 널리 사용되는 FPGA 제품은 Xilinx의 XAZU2EG, XAZU3EG, XAZU4EV, XA7S15, XA7S50, XA7A50T, XC7Z020 등의 제품입니다. 그 외에도 LATICE의 LIFCL-40, E.L.의 Ti60F255, Anlogic의 EG4X20BG256 등이 있습니다.
2) 일반적인 SoC 모델 로는 TI의 TDA4, HiSilicon의 Hi3559 및 V322712F3, 그리고 RoboSense가 자체 개발한 Su2220M 칩이
있습니다.
가장 일반적인 SPAD-SoC는 Sony의 IMX459 및 IMX479와 HiSilicon, Hesai, RoboSense에서 개발한 SPAD-SoC, 그리고
Fushi Technology와 Lingming Photonics의 제품입니다.
3) MCU에는 주로 TI의 AM2432, AM2632C, F28386DZWTQ, NXP의 S32K341, MIMXRT1052CVL5B,
Infineon의 TC3 시리즈, National Semiconductor의 N32G435 및 Microchip의 PIC18F57Q84 등이 포함됩니다.
1. 장거리 라이다 용 메인 프로세서
일부 레이더는 여러 종류의 프로세서를 사용하지만, 아래 이미지는 주 프로세서만 보여줍니다.

보시는 바와 같이 FPGA는 여전히 주류 기술입니다.
하지만 많은 주요 제조업체들이 집적도를 향상시키고 비용을 절감하며 시스템 성능을 최적화하기 위해
RoboSense MX, Huawei D3P, Huawei Limera와 같은 자체 SoC 칩을 개발하고 있습니다.

알고리즘이 발전함에 따라 향후에는 전용 칩이 범용 칩을 점차 대체할 것입니다.
2. 단거리 라이다 용 메인 프로세서

단거리 라이다의 미래 추세는 단일 칩 SPAD-SoC의 사용입니다.
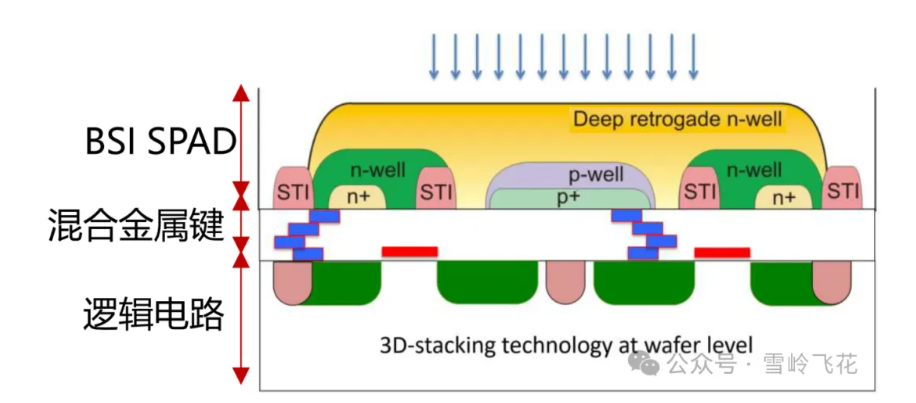
현재 SPAD-SoC에서 후면 발광 SPAD+3D 스태킹 기술의 활용은 중요한 추세입니다.
3D 스태킹은 새롭게 설계된 BSI-SPAD와 첨단 하이브리드 본딩 기술을 기반으로 하며,
이는 웨이퍼 제조 업체와의 긴밀한 협력이 필요한 고도의 전처리 공정입니다.
3. 360° LiDAR용 메인 프로세서

컴퓨팅 성능 요구량이 낮은 일부 360° LiDAR 시스템은 MCU만 사용하지만, 고성능 제품은 여전히 FPGA를 사용해야 합니다.
발전 추세
시나리오에 따라 요구 사항도 다릅니다. 예를 들어, 차량 탑재형 주 레이더는 장거리 탐지, 고해상도 및 자동차 수준의 신뢰성을
강조하고,
사각지대 레이더는 소형화와 넓은 시야각을 추구하며, 로봇 레이더는 저비용, 저전력 소비 및 고정밀도에 중점을 둡니다.
현재까지의 관찰 결과에 따르면, LiDAR의 발전 추세는 크게 5가지로 나눌 수 있습니다.
1) 고성능, 2) 높은 비용 효율성, 3) 융합, 4) 순수 고체형, 5) 지능형 응용 분야 구현입니다.

1. 고성능: 레벨 3 이상의 자율 주행을 위한 강력한 인지 도구.
자율주행 기술이 점차 보편화됨에 따라, 0.05° 이상의 각도 해상도를 구현하기 위해서는
300라인 이상의 고성능 LiDAR가 필요합니다.
대표 제품으로는 RoboSense EM4, Hesai AT360 및 AT1440, Huawei D5, Tudatong K3 등이 있습니다.
아래는 RoboSense EM4의 포인트 클라우드 효과입니다.

2. 높은 비용 효율성: 레벨 2 자율주행 보급률의 지속적인 증가를 뒷받침합니다.
최대 200라인의 LiDAR는 레벨 2 자율주행 요구 사항을 충족할 수 있습니다.
성능 요구 사항을 충족하면서 비용을 최소화하는 것이 고객 확보의 핵심입니다.
대표적인 제품으로는 RoboSense MX, EMX, Hesai ATX, Huawei D3P, Tudatong E1X 등이 있습니다.
비용을 절감하는 주요 방법은 아키텍처를 단순화하고, 통합을 강화하고, 칩을 국내에서 생산하고, 출하량을 늘리는 것입니다.
가스구의 통계에 따르면 2023년부터 2025년 상반기까지 신에너지 자동차 시장에서 라이다(LiDAR)의 보급률은
지속적으로 증가할 것으로 예상됩니다.

내년에 10만 위안 내외의 가격대에 속하는 스마트 자동차들이 대량 생산에 들어갈 것으로 예상됨에 따라,
보급률이 새로운 수준에 도달할 것으로 전망됩니다.
3. 융합: 여러 센서의 전면 융합을 통해 최상의 성능을 제공합니다.
LiDAR를 카메라 및 밀리미터파 레이더와 같은 센서와 융합하면 데이터 동기화가 향상되고
전반적인 인식 정확도가 개선될 수 있습니다.
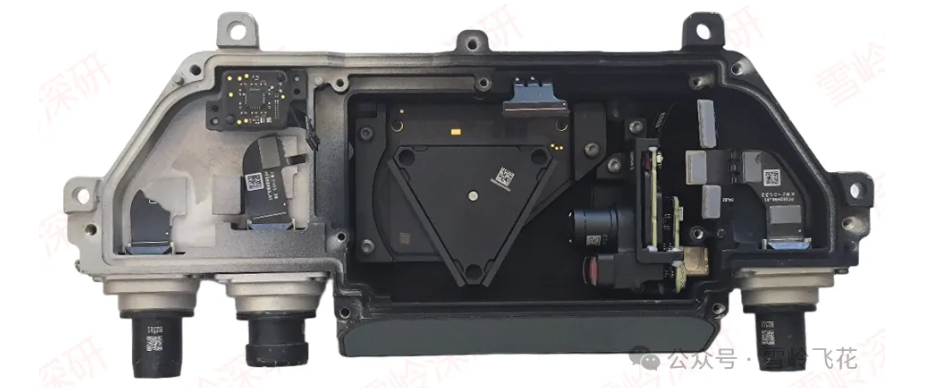
대표적인 예로는 주오위(Zhuoyu)의 JIMU 시스템과 화웨이 리메라(Huawei Limera)가 있습니다.
아래는 주오위 JIMU 시스템의 예입니다.
4. 순수 고체 상태: 미니멀리즘 건축 디자인
고체형 라이다는 움직이는 부품이 없어 비용 절감 가능성이 가장 높습니다.

현재 순수 고체형 LiDAR는 주로 플래시 솔루션을 사용하며
SL210, RoboSense E1, Hesai FT120과 같은 사각지대 보완 시나리오에 적용되고 있습니다.
화웨이의 리메라(Limera)는 장거리, 소각 탐지를 위해 순수 고체 기술을 실험하고 있습니다.
순수 고체 스캐너의 개발에 성공하면 완전 고체 방식의 전방 주 레이더를 구현할 수 있게 됩니다.
5. 구현된 지능: 차량 내 지능에서 모든 시나리오 지능으로
로봇공학, 스마트 교통, 산업 자동화 분야에서 LiDAR의 활용도 빠르게 증가하고 있으며,
잔디 깎는 로봇과 무인 배송 로봇이 주요 응용 분야로 떠오르고 있습니다.
현재 대표적인 제품으로는 Lanwo MID-360, RoboSense Airy/E1R, Hesai JT 시리즈 등이 있습니다.
화웨이는 로봇 분야를 위한 LiDAR 제품도 개발 중입니다. 아래는 RoboSense E1R이 장착된 스마트 잔디깎이의 예입니다.

최고 선수들
2021년 9월, XPeng P5는 Lanwo HAP LiDAR를 최초로 탑재하여 양산 차량에 LiDAR를 대규모로 적용하는 시대를 열었습니다.
불과 몇 년 만에 중국의 독립 브랜드들이 급속도로 성장했습니다.
로보테크, 허사이 테크놀로지, 화웨이, 투다퉁 등 4대 선두 기업이 시장 점유율 95% 이상을 차지하고 있습니다.
각 기업은 차별화된 성장 경로를 밟아왔으며, 이들의 기술 선택은 시장 지위뿐 아니라
산업 발전 방향에도 상당한 영향을 미치고 있습니다.
NE Era의 데이터에 따르면, 2025년 1월부터 10월까지 Hesai, Huawei, RoboSense, Tudatong 등
4개 회사의 전방 메인 레이더 총 판매량은 200만 4천 대에 달했습니다. 월별 변동 내역은 다음과 같습니다.
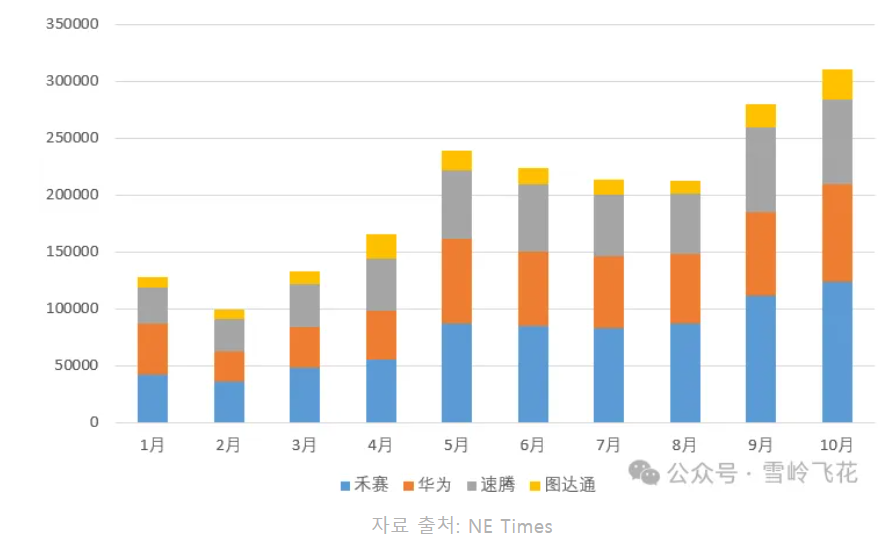
2025년 라이다 총 판매량은 300만 대에 이를 것으로 추산되며,
2024년 전체 판매량은 159만 5천 대였던 것을 고려하면 라이다 기술 도입이 급속도로 성장하고 있음을 알 수 있습니다.
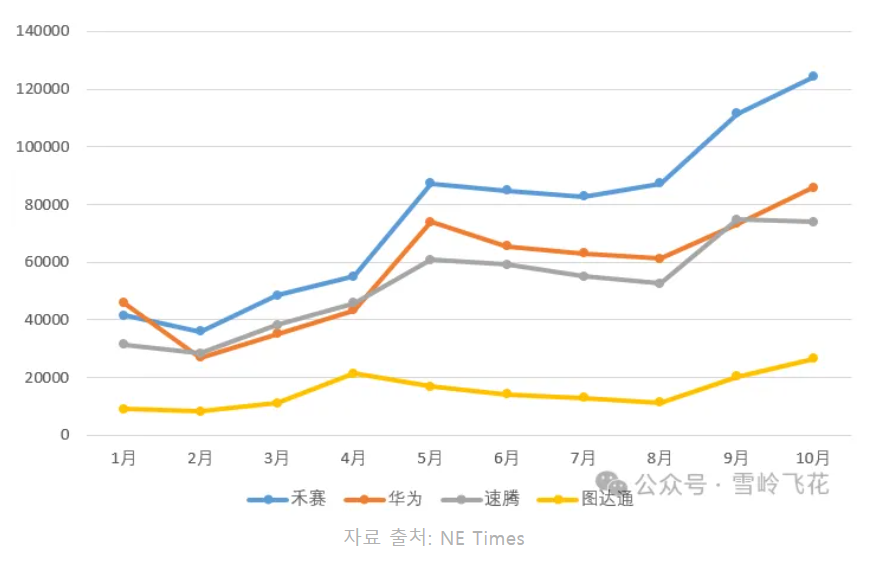
Hesai, Huawei, RoboSense, Tudatong의 전방 메인 레이더 월별 판매량은 다음과 같습니다.
Hesai는 올해 특히 뛰어난 실적을 기록하며 대부분의 달에 출하량 1위를 차지했습니다.
1. 로보센스: MEMS 분야의 확고한 입지에서 디지털 전환의 선구자로
RoboSense는 MEMS 솔루션을 성공적으로 대량 생산한 유일한 제조업체입니다.
또한 회전 미러 솔루션 방식을 개척했고, 520라인 LiDAR EM4를 출시했으며,
자체 개발한 SPAD-SoC와 프로세서를 이미 양산하고 있습니다.
자동차 분야 외에서 로보센스는 플래시 솔리드 스테이트 기술을 통해 로봇 시장에 진출했습니다.
E-플랫폼 제품은 쿠마 테크놀로지로부터 120만 대 주문을 확보했으며,
에어리 반구형 레이더는 휴머노이드 로봇의 요구에 맞춰 생산 라인을 192개로 확장했습니다.

1) M 플랫폼: 매우 높은 비용 대비 성능을 갖춘 MEMS 레이더 솔루션
MEMS 솔루션을 활용한 M 시리즈 라이다의 발전 과정:
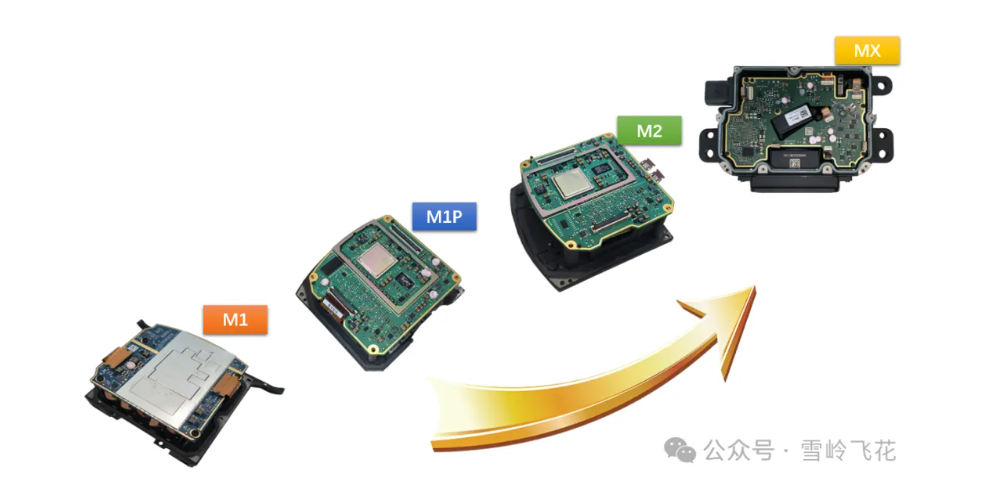
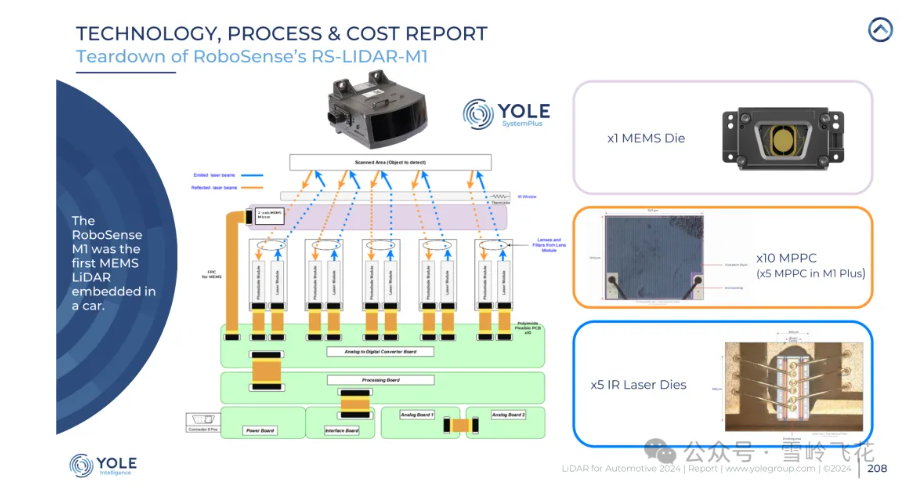
초기 M1 시리즈(아래 시스템 아키텍처 참조)는 광범위한 이중화 기능을 갖춘 승용차용 대량 생산용으로 설계된
최초의 MEMS LiDAR였습니다.
이후 개발된 M1P 및 M2 아키텍처는 M1과 유사하지만 회로 구조, 송수신기 부품 및 광 링크에서 상당한 최적화가 이루어졌습니다.
M 시리즈의 이전 모델들과 비교하여 MX는 크게 재설계된 아키텍처를 특징으로 하며,
회로 기판과 송수신 모듈을 더욱 간소화했습니다.
또한 최초로 자체 개발 프로세서를 탑재했습니다.
MX는 MEMS 기술을 사용하는 마지막 세대 제품이기도 합니다.

2) EM 플랫폼: 완전히 새로운 회전 거울 솔루션 시리즈
로보센스는 2025년에 EM 시리즈 레이더를 출시하여 1차원 회전 거울 솔루션을 개척할 예정이며,
EM4와 EMX가 대표적인 제품입니다.
EM4는 520~2160 라인으로 유연하게 구성할 수 있으며, 현재 500개 이상의 라인을 탑재한 유일한 양산형 고빔 라이다입니다.
지지 LS6, LS9, 지케 9X와 같은 고급 모델에 양산되어 사용되고 있습니다.

보도에 따르면 EMX는 49개 모델의 주문을 확보했으며 2026년에 양산에 들어갈 것으로 예상됩니다.
3) 자체 개발 칩
RoboSense는 자체 개발 칩을 매우 중요하게 생각합니다.
자체 개발한 SoC(M-Core)는 이미 MX 플랫폼에서 양산 중입니다.
또한 자체 개발한 레이저 드라이버 칩과 SPAD-SoC는 E 플랫폼의 전고체 LiDAR와 Airy 360° LiDAR에 적용되어
양산되고 있습니다.

2. 헤사이 기술: 고성능에서 높은 비용 효율성까지
헤사이는 1D 스캐닝과 VCSEL 솔루션을 최초로 도입하고 안정적인 제품 전략을 고수하며
SiPM 기술 로드맵에 집중해 왔습니다.
혁신적인 시스템 설계와 자체 개발 칩을 결합하여 고성능이면서도 비용 효율적인 여러 블록버스터급 제품을 생산하며
출하량 선두를 달리고 있습니다.

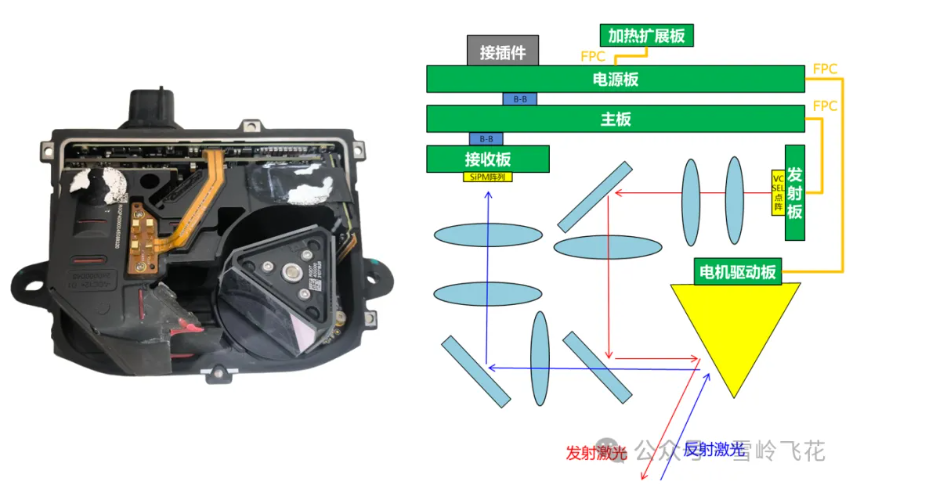
1) AT 시리즈: 1차원 회전 거울 솔루션을 목표로 한 최초의 시리즈
헤사이의 기술 로드맵은 비교적 안정적입니다.
자동차 OEM 시장을 겨냥한 첫 양산 제품인 AT128은 1차원 회전 미러 솔루션을 활용합니다.
이 솔루션은 형태가 잘 갖춰진 포인트 클라우드를 생성하여 백엔드 알고리즘 개발에 매우 편리하며,
지난 몇 년간 업계에서 점차 주류 솔루션으로 자리 잡았습니다.
AT128 시스템 아키텍처는 다음과 같습니다.
2025년, 헤사이는 AT128 대비 물리적 송수신기 수를 절반(128개에서 64개로)으로 줄인
더욱 경제적인 ATX LiDAR를 출시했습니다.
혁신적인 시스템 설계를 통해 케이블 수를 늘려 성능 저하 없이 가격을 200달러 미만으로 낮췄습니다.
ATX는 헤사이의 주력 제품이 되었으며, 리프모터(Leapmotor)와 BYD 같은 기업들이 진출하는
10만 대 규모의 스마트카 시장에 진출하는 데 크게 기여했습니다.
ATX의 혁신적인 테스트 솔루션:

2) VCSEL+SiPM은 최고의 제품을 만들어냅니다
헤사이의 제품은 현재 주로 VCSEL+SiPM 트랜시버 아키텍처를 활용하여 탁월한 비용 효율성을 자랑합니다.
앞서 언급한 ATX 외에도 로봇 분야에서는 16라인 솔루션을 제공하는 JT16 레이더가
여러 주요 스마트 잔디깎이 제조업체로부터 수십만 건의 주문을 확보하며 시장의 벤치마크 제품으로 자리매김했습니다.

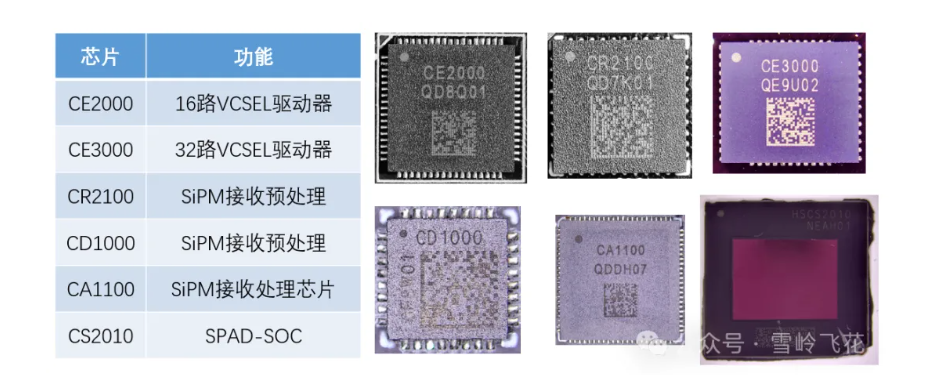
3) 자체 개발 칩
헤사이는 드라이버 칩, 수신기 처리 칩, SPAD-SoC를 포함하여 LiDAR용 핵심 부품들을 자체적으로 다수 개발했습니다.
2025년 11월 24일, 헤사이는 고성능 LiDAR용 지능형 메인 제어 칩인 페르미 C500을 출시했습니다.
이 칩은 RISC-V 아키텍처를 채택하여 MCU, FPGA, ADC를 통합하고,
256코어 파형 처리 코어를 갖춘 내장형 포인트 클라우드 지능형 엔진(IPE)을 특징으로 합니다.

3. 화웨이: 후발주자에서 혁신 선도자로
화웨이는 강력한 혁신 역량과 산업 생태계를 바탕으로 라이다 제품 출하량이 급증함에 따라
라이다 제품 형태의 혁신과 변화를 선도하고 있습니다.

1) 강력한 연구 개발 역량과 산업 생태계의 결합으로 시장 점유율을 빠르게 확대할 수 있습니다.
화웨이의 자율주행 시스템은 초기 단계에서 주로 로보센스(RoboSense) 제품을 사용했습니다.
자체 개발한 차량용 라이다 D2는 초기에는 순조롭지 못했습니다. 2020년에 공개되었지만,
공식적인 양산은 2022년에야 시작되었습니다.
하지만 화웨이는 강력한 연구 개발 역량과 산업 생태계를 바탕으로 제품 출시 속도를 점차 높여왔으며,
시장 점유율도 꾸준히 증가시켜 왔습니다.
여러 권위 있는 언론 매체의 자료에 따르면, 화웨이의 장거리 LiDAR 출하량은 현재 허사이(Hesai)에 이어 2위이며,
단거리 사각지대 LiDAR 출하량은 다른 제조업체들을 훨씬 앞서고 있습니다.

2) 기술 혁신을 지속적으로 선도한다
화웨이의 LiDAR 제품은 혁신적인 설계 덕분에 여러 "최초" 기록을 달성했습니다.
화웨이는 SPAD-SoC 솔루션을 장거리 LiDAR에 최초로 적용한 기업으로
D2, D3, D5, SL210, Limera 모델 모두 이 솔루션을 탑재했습니다.
이 방식은 현재 장거리 LiDAR, 특히 고출력 빔 LiDAR에 매우 유망한 솔루션으로 평가받고 있습니다.

화웨이가 최초로 양산한 사각지대 감지용 플래시 라이다(LiDAR)를 공개했습니다.
사각지대 감지 라이다는 자율주행 시스템, 특히 레벨 3 이상의 고급 자율주행 시스템의 안전성을 향상시킬 수 있습니다.
샤오미를 비롯한 더 많은 차량에 내년에는 사각지대 감지 라이다가 탑재될 것으로 예상됩니다.

화웨이가 출시한 첫 번째 제품인 리메라(Limera)는 광축을 공유하는 라이다(LiDAR)와 비전 융합 제품으로,
카메라와 라이다 간의 데이터 정렬을 훨씬 쉽게 만들어 또 하나의 중요한 이정표를 세웠습니다.
3) 자체 개발 칩
화웨이는 자체 개발 칩 기술에서 탄탄한 입지를 구축해 왔습니다.
특히 LiDAR 분야에서 화웨이는 메인 프로세서, SPAD-SoC, 레이저 및 드라이버를 포함한 여러 핵심 부품을 자체 개발했습니다.
예를 들어, 화웨이가 자체 개발한 SoC 프로세서는 다음과 같습니다.

4. 투다통: 두 갈래 길 게임에서 변신을 시도하는 도전자
Tudaton은 1550nm 기술 분야에서 탁월한 기업으로, 905/940nm 솔루션도 개발하여
Falcon, Sparrow, Hummingbird를 포함한 장기, 중기, 단기 고성능 및 저가형 제품을 아우르는
완벽한 제품 포트폴리오를 구축하고 있습니다.

1) 1550nm 초장거리 LiDAR 전문가
투다통의 팔콘 시리즈는 고성능 시장을 겨냥하여 1550nm 레이저 솔루션을 사용합니다.
300라인에 해당하는 "회전 거울 + 갈바노미터" 방식을 채택하여 탁월한 거리 측정 기능을 제공하며,
주로 니오(NIO)의 고급 차량에 사용됩니다.
최신 1550nm 제품은 Falcon K3이며, 성능 사양은 다음과 같습니다.

2) 905/940nm 공정을 적용한 링큐 LiDAR
2024년부터 투다통은 시장 수요에 맞춰 보다 경제적인 링퀘(Lingque) 시리즈를 출시하는 이중 전략 조정을 시작했습니다.
링퀘 E1X는 "VCSEL+SiPM+1D 스캐닝" 솔루션을 적용했으며,
여러 주요 자동차 제조업체와 합작 투자 브랜드에서 채택되었습니다.
초기형 링큐 E1과 양산형 링큐 E1X:

3) 2025년 12월 10일, 투다통은 홍콩 증권거래소에 성공적으로 상장하여 더욱 빠른 발전 단계에 진입할 수 있었습니다.
결론
이 20개 이상의 LiDAR는 서로 다른 시기에 출시되었고 "시간대별" 시나리오와 같은 다양한 상황에 적용되어
LiDAR의 명확한 발전 궤적을 보여줍니다.
레벨 3 자율주행 및 운전자 보조 시스템이 의무 표준이 되고 비용이 점차 감소하고 성능이 향상됨에 따라 핵심 인지 장치로서 LiDAR의 가치가 더욱 두드러지고 있습니다.
기업에게 있어, "성능 향상"과 "비용 절감"이라는 두 가지 과제를 동시에 해결하고 자동차 및 로봇 애플리케이션과 같은 다양한 시나리오의 요구 사항을 정확하게 충족할 수 있는 기업이 이러한 인식의 혁명 속에서 두각을 나타낼 것입니다.
'중국 휴대폰' 카테고리의 다른 글
| 26년도 자동차 산업 전망 (0) | 2026.03.16 |
|---|---|
| 26년 3월 16일의 경제/ IT 단신 뉴스 (0) | 2026.03.16 |
| 26년 3월 13일의 경제/ IT 단신 뉴스 (0) | 2026.03.13 |
| 26년 3월 12일의 경제/ IT 단신 뉴스 (0) | 2026.03.12 |
| [증권보고서]글로벌 휴머노이드 시리즈 2 : walk to walk (0) | 2026.03.12 |